Robot Touch Characteristics and Emotional Responses
ECG and fNIRS evidence on how touch type, length, and location shape users' emotional responses in HRI.
Fu Guo, Chen Fang, Mingming Li, Zenggen Ren, and Zeyu Zhang
Robot touch is an important interaction channel for emotional communication and mental support in human-robot interaction, yet the design space of touch behaviors remains underexplored. This project examined how touch type (contact versus grip), touch length (long versus short), and touch location (hand versus forearm) influence users’ subjective emotions and physiological responses.
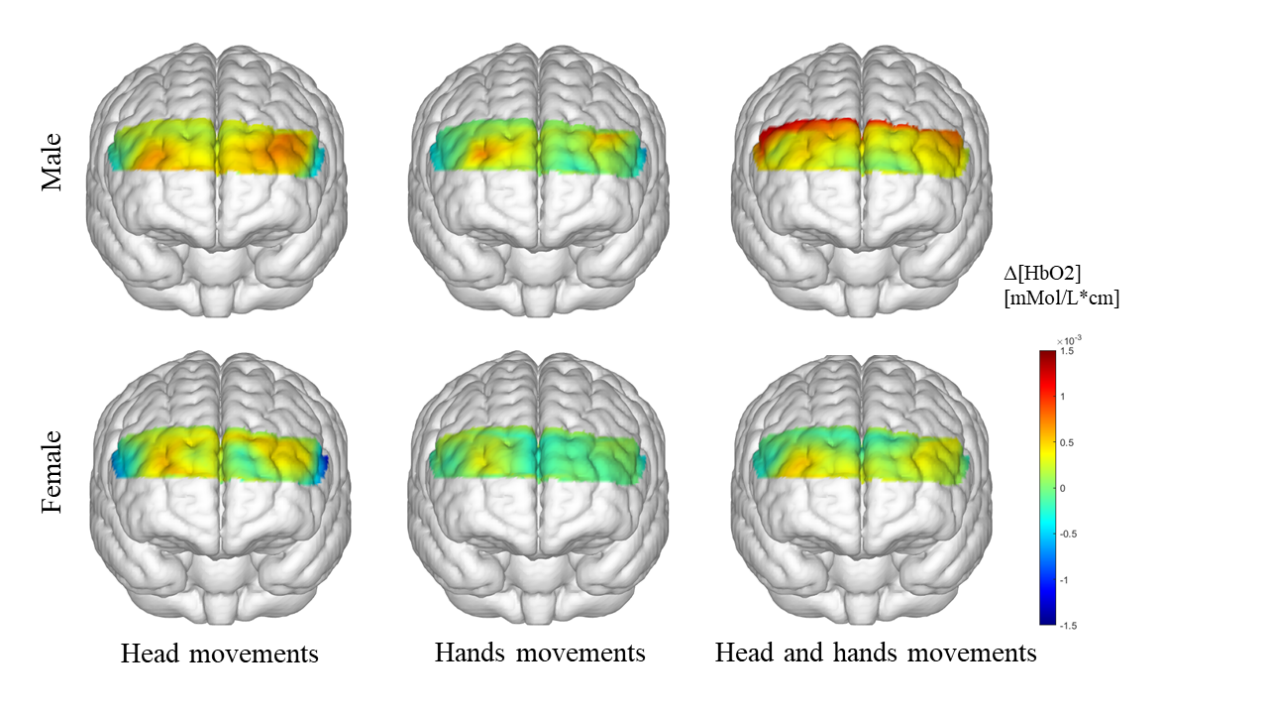
We conducted a within-subject study that combined self-reported affect with electrocardiography (ECG) and functional near-infrared spectroscopy (fNIRS). The results showed that touch type and length jointly influenced subjective emotional experience and cerebral activity, while touch location affected heart-rate variability and cerebral responses.
The findings suggest that short-grip and long-contact robot behaviors may induce more positive emotions, while forearm touch may support emotional regulation even when it does not directly increase positive affect. This work was published in the International Journal of Social Robotics.